
- Apr 7
Innovations in Robotic Surgery
- Gajan G (edited by Seyon K)
- Medicine, Technology, Artificial Intelligence
- 0 comments
Though initially it may sound incredibly modern, robotic surgeries have been in use since 1985. The PUMA 560 ( a modified industrial robotic arm) was used to perform neurological biopsies, where a small sample of brain tissue was removed - the robot served to hold a needle as part of the biopsy. The accuracy of the robot however was within 0.05mm. Though impressive for being the first robot of its kind, the level of accuracy clearly needed improvement as taking a brain sample 0.05mm from the correct location could clearly have fatal consequences.
The 90s brought great breakthroughs in the use of robots in surgery. The Robodoc, introduced in 1992, was used in hip surgeries. The Robodoc acted as a computer guided mill of sorts, that was used to make a well in the femur to allow for a hip replacement prosthetic to be put in place. The Robodoc was an effective tool with studies suggesting the well drilled by the Robodoc was more accurate compared to previous, conventional techniques.
Later in the 90s, in 1994 the first of the AESOP models of robots were introduced which held a camera as part of endoscopies. The AESOP 1000, was introduced in 1994 and while useful in holding and positioning the endoscopic camera it had clear limitations in that it was controlled by hand or foot pedals meaning an assistant was required to hold the camera instead of performing another, more useful task or potentially the surgeon had to operate the robot. However the AESOP 1000 received a significant upgrade in the form of its successor, the AESOP 2000. This new model had replaced the pedals with a voice control system, allowing the surgeon to have control of the endoscope without using their hands or feet, meaning they could put more of their focus into the endoscopy they were performing. The AESOP models final model, the AESOP HERMES again provided huge upgrades. Whilst retaining the voice control system of the 2000, it also had functions such as operating room lighting and movement of the operating table.
A third key development in the 90s was the introduction of telerobotics - the idea of a surgeon remotely operating the robot while the robot held the implements and conducted the surgery. In the 1980s, NASA collaborated with the Ames research centre to produce a head-mounted VR display. John Fisher, a NASA scientist and Joe Rosen recognised the potential to use this technology in surgery. The Pentagon's Defense Advanced Research Projects Agency (DARPA) were informed about the potential to use telesurgery on battlefields where a doctor could operate on a wounded soldier from a safe location. In 1997, Intuitive Surgical’s daVinci ( a robot which performed telesurgeries) was used to perform a laparoscopic cholecystectomy in Belgium. Laparoscopic surgery (also known as keyhole surgery) involves small incisions, usually in the abdominal region. This perfectly fit the daVinci robot which enhances the surgeon’s dexterity and reduces the effect of a surgeon’s hand tremoring meaning incisions were more precise, as required in laparoscopies. The initial daVinci model exemplified the high rate of innovation in robotic involvement in surgeries as it had far more features than the initial PUMA 560. For example, the daVinci robot consisted of a remote surgeon’s console and a three-armed robotically controlled instrument drive system. The console had two viewers, one for each eye, which provided a three-dimensional view of the operating field. In order to reduce tremors, as previously mentioned, the daVinci tracked the surgeon’s movements 1,300 times per second and provided for tremor filtration and scaled motion—translating larger movements of the surgeon’s hand into finer movements of the wristed instrumentation.
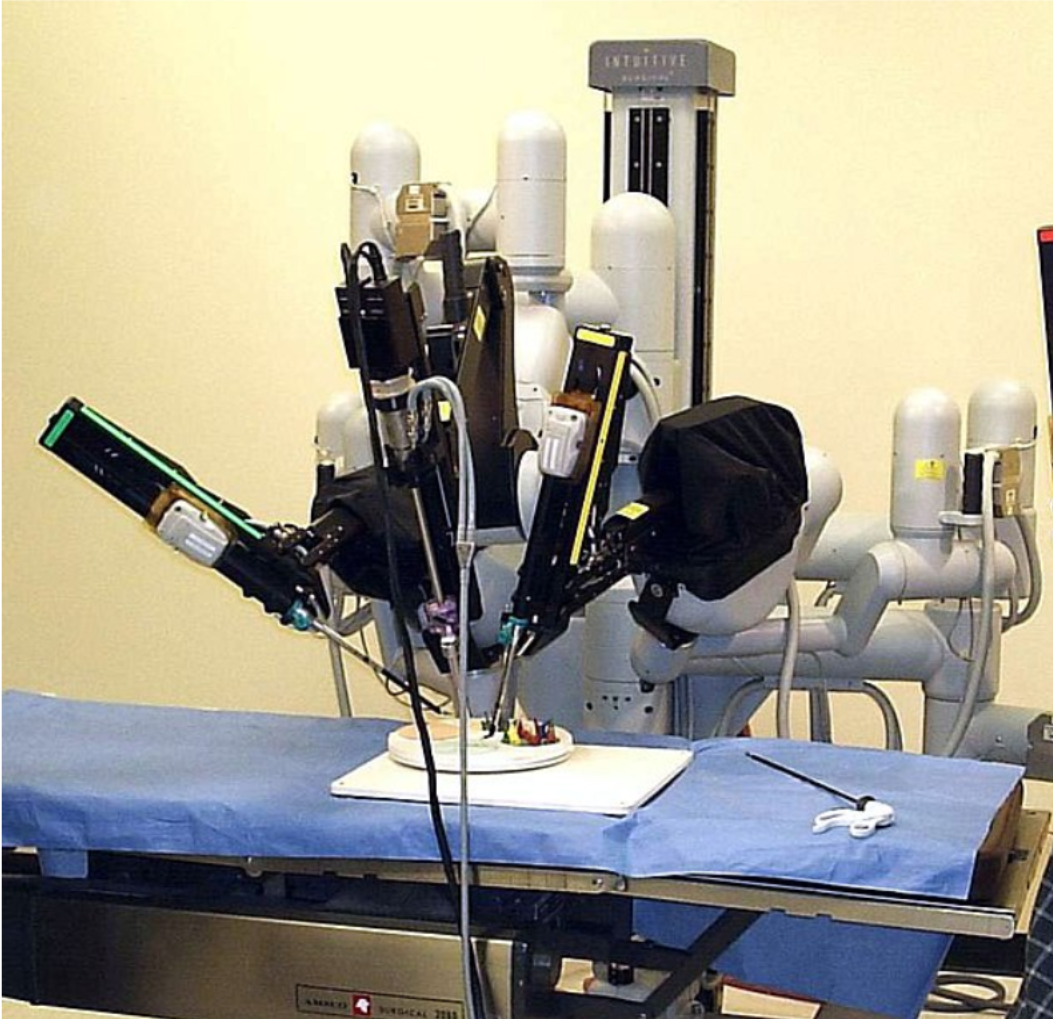
Figure 1 [3]

Figure 2 [4]. Both of these show the daVinci robot.
In 1999, Computer Motion Inc. introduced a direct competitor, the Zeus surgical system, which differed from daVinci mainly in the configuration of the surgeon’s workstation. To operate, the surgeon would sit at a console and wear polarized goggles to view the operative field in 3D. The Zeus would be responsible for a historic moment in telerobotics in 2001 where the first transatlantic surgery took place, given the name Operation Lindberg after Charles Lindberg - the American aviator who performed the first solo transatlantic flight, where a patient in Strasbourg, France was operated on by a Zeus robot which was controlled by a doctor in New York. Though initially it would seem that an expected time lag between the doctor’s movements and the robots movements would cause significant problems, a high bandwidth of 155ms was used resulting in there being no problems - The procedure, which lasted 54 minutes, was performed with no technical incidents and with no perception of distance.
In 2003, after 3 years of legal battles, the companies behind Zeus and daVinci merged. This has led to a period where daVinci has still dominated the robotic surgery industry with Intuitive Surgical Inc. having the highest market share in 2018. The daVinci models’ continued development has likely played a large part in the company’s continued dominance. In 2002, realising the need for an extra instrument in the surgical field, a four-arm robotic version was approved for clinical use which would allow for the possibility of controlling and improving the exposure of anatomical structures and would also reduce dependence on surgical assistants. In addition, hand tremors were eliminated on the second model. In 2006 the daVinci S model introduced a 3D high-definition (HD) camera with a simplified set-up and an interactive touch screen display. Following on from this, three years down the line, the da Vinci Si model was released. The new Si platform offered dual console surgery which introduced a reproducible and supervised manner of simulation and training for non-expert surgeons. In 2014, the Xi model of the daVinci was released with a large number of redesigns. The arms were redesigned to enable a greater range of motion and a reduction in collisions. Multiple ergonomic adjustments provided increased comfort and reduced fatigue during surgical procedures and the surgeon’s hand movements were scaled, filtered, and seamlessly translated to the instrument tips for more precise instrument control. In 2017, a cost-friendly version of the Xi was made, called the X, providing a cheaper alternative for hospitals on lower budgets.

Figure 3 [7], The Xi
Starting from a robot which held a needle to now robots that can be operated to perform surgeries from across the world, it’s clear that robotic surgery is one of the greatest examples of innovations within the field of medicine.
References:
MORRELL ALG, MORRELL-JUNIOR AC, MORRELL AG, MENDES JMF, TUSTUMI F, DE-OLIVEIRA-E-SILVA LG, et al. The history of robotic surgery and its evolution: when illusion becomes reality. Revista do Colégio Brasileiro de Cirurgiões [Internet]. 2021;48. Available from: https://www.scielo.br/j/rcbc/a/4qVcw3NC75jwPNtkgkhwSWf/?format=pdf&lang=en
Hockstein NG, Gourin CG, Faust RA, Terris DJ. A history of robots: from science fiction to surgical robotics. Journal of Robotic Surgery. 2007 Mar 17;1(2):113–8.
Wikipedia N at E. Bosanski: Aparat za laparoskopiju. [Internet]. Wikimedia Commons. 2006. Available from: https://commons.wikimedia.org/wiki/File:Laproscopic_Surgery_Robot.jpg
File:WBAMC first in DoD to use robot for surgery 160502-A-EK666-474.jpg - Wikimedia Commons [Internet]. Wikimedia.org. 2016 [cited 2026 Mar 24]. Available from: https://commons.wikimedia.org/wiki/File:WBAMC_first_in_DoD_to_use_robot_for_surgery_160502-A-EK666-474.jpg
Surgical Robots Market Size, Growth | Global Report, 2026 [Internet]. www.fortunebusinessinsights.com. Available from: https://www.fortunebusinessinsights.com/industry-reports/surgical-robots-market-100948
Pugin F, Bucher P, Morel P. History of robotic surgery : From AESOP® and ZEUS® to da Vinci®. Journal of Visceral Surgery [Internet]. 2011 Oct;148(5):e3–8. Available from: https://www.sciencedirect.com/science/article/pii/S1878788611000324
File:New Da Vinci Xi.jpg - Wikimedia Commons [Internet]. Wikimedia.org. 2018 [cited 2026 Mar 24]. Available from: https://commons.wikimedia.org/wiki/File:New_Da_Vinci_Xi.jpg
{kind=link}
{kind=link}
{kind=link}